Vessel Laminae Segmentation
| Line 21: | Line 21: | ||
| − | <gallery perRow="2"> | + | <gallery perRow="2" widths="500px"> |
| − | Image:Sample_segmentation.jpg | + | Image:Sample_segmentation.jpg|Segmented image |
| − | Image:Sample_segmentation_overlaid.jpg | + | Image:Sample_segmentation_overlaid.jpg|Segmentation overlaid on the raw image |
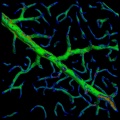
| − | Image:Sample_confidence_map.jpg | + | Image:Sample_confidence_map.jpg|Confidence map over the segmentation |
| − | Image:Sample_curvature_map.jpg | + | Image:Sample_curvature_map.jpg|Curvatuve map over the segmentation |
</gallery> | </gallery> | ||
==Programs== | ==Programs== | ||
Revision as of 18:19, 10 April 2009
Contents |
Vessel Segmentation
This page describes the vessel segmentation algorithm, which is a
Background and motivation

Accurate and rapid segmentation of microvasculature from three-dimensional (3-D) images is important for diverse studies in neuroscience, tumor biology, stem-cell niches, cancer stem cell niches, and other areas. It is needed for measuring vascular features such as surface areas, diameters and tortuosities of vessel segments, branching patterns of the vascular tree, and distributions and orientations of cells relative to the vasculature. When time-lapse imaging of living vasculature is performed, segmentation results can be used for analyzing angiogenesis. Finally, quantifying the impact of pharmacological interventions requires vessel segmentation for change analysis.
Vessel segmentation algorithm presents a robust 3-D algorithm to segment vasculature that is image by labeling laminae, rather than lumenal volume. The signal is weak, sparse, noisy, non-uniform, low-contrast, and exhibits gaps and spectral artifacts, so adaptive thresholding & Hessian filtering based methods are not effective.
The Algorithm
The algorithm has four steps
- The first step of our algorithm identifies high-confidence foreground voxels using a robust voxel-based generalized hypothesis test.
- The second step performs an adaptive region growing algorithm to identify additional foreground voxels while rejecting noise. This also yields relative estimates of detection confidence at each voxel.
- The third step uses the marching tetrahedra algorithm to link the detected foreground voxels to produce a triangulated 3-D mesh with watertight isosurfaces. The mesh is smoothed using a volume-preserving algorithm to eliminate jagged facets, and adaptively decimated using an edge-collapsing and volume-preserving algorithm to produce the final mesh. Once this is complete, we estimate the local surface curvature at each triangle.
- Finally, we extract the vessel topology by generating a filled-in vessel that could be traced by tube tracing techniques to produce centerline estimates.
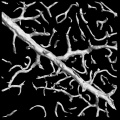
Segmented image
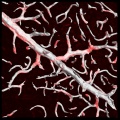
Segmentation overlaid on the raw image

Confidence map over the segmentation
Curvatuve map over the segmentation



